半岛·BOB官方网站 智能车浅谈—电机控制篇
这里的反馈链接是采用的增量式旋转编码器(常见的旋转编码器分为绝对式和增量式,有兴趣的朋友可以自行了解一下);
T法与M法作为信号处理方法(数字测速方法有三种:T法、M法、M/T法;对分辨率、测速误差率等知识感兴趣的同学可以自行找书学习)关于编码器,硬件部分我已经分析过了,不懂的可以去我的第一篇博文看看
这里主要分析M法和T法测速。电机每转一圈,编码器共产生一个Z脉冲(智能车中电机圈数和编码器圈数不是1:1的,需要根据齿轮比换算)。编码器输出脉冲的频率为f1=M1/Tc。
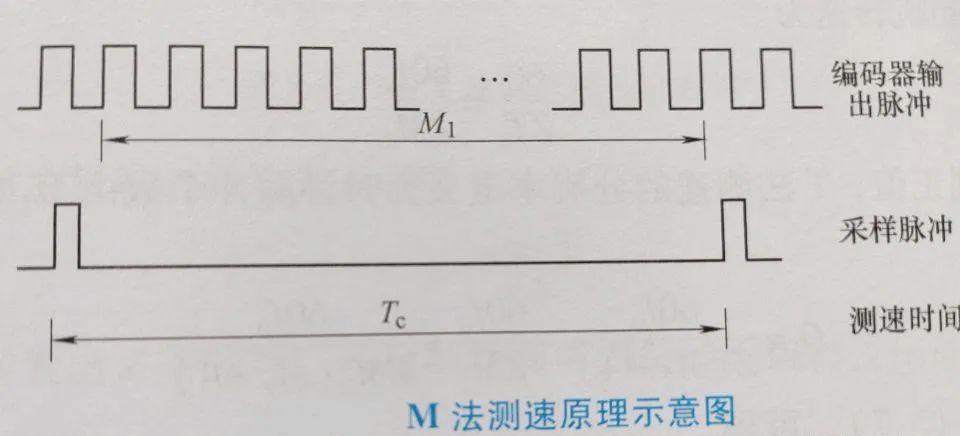
M法测速:
M法测速:在一定时间段Tc内测量旋转编码器输出的脉冲个数M1,计算出这段时间内的转速,称为M法测速。
系统定时器根据采样周期设定一个时间周期,这里我们假设Tc=1s,利用单片机的计数器来捕获这段时间内编码器产生的上升沿或下降沿的个数,这里假设M1为1024,如果电机转一圈,编码器就产生512个脉冲。
此时的速度为:
n = M1 / Z*Tc = 1024 / 512×1 单位:r/s
n1 = 2 转/秒
M法总结:设定一个时间段Tc,记录这个时间段内产生的脉冲个数M1,然后与电机运动一圈产生的脉冲个数Z合并得到n=M1/Z*Tc。
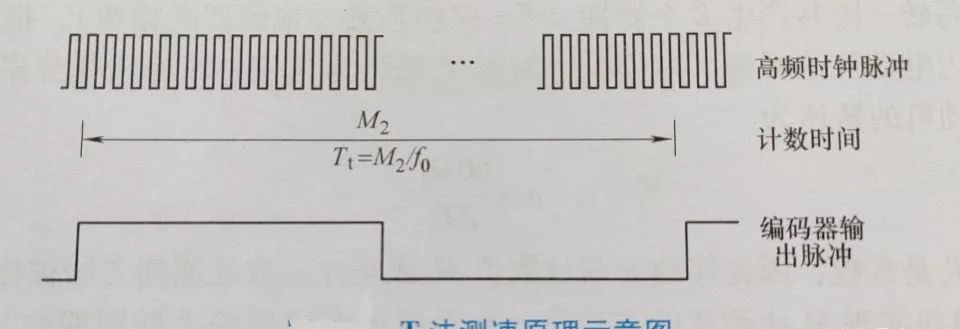
T法测速
T法测速是测量旋转编码器两次输出脉冲之间的间隔时间来计算转速,又称周期法测速。
T法测速其实就是采集编码器两个相邻上升沿或者下降沿所花费的时间。
Tt=M2/f0;
M2可以理解为编码器从第一个上升沿到第二个上升沿的时钟周期数。
f0可以理解为单片机的时钟脉冲频率;
为了便于理解,假设单片机时钟在1s内可以产生65536个时钟脉冲,编码器两个上升沿之间的时钟脉冲个数为M2=65。那么编码器一个脉冲的时间为
Tt = 65 /(65536/1)= 0.001秒
那么此时的速度满足:n = f0 / Z*M2
所以:n2 = 65536 / 512 * 65 = 1.97 r/s
概括:
T法和M法都是计算转速,如果要得到实际速度,还需要知道车轮转一圈后车子行驶的距离。
但对于智能汽车来说,实际车速的参考值与单位时间脉冲个数的参考值是一样的,都可以反映车速BOB半岛·体育在线登录,两者的区别只是由机械结构决定的一个比例。
所以怕麻烦的同学可以直接选取脉冲个数作为转速量进行控制,数字测速还有M/T法,可以很好的弥补T法、M法的不足。
它无论高速还是低速都有很好的分辨率和检测精度,有兴趣的同学可以自行了解半岛·BOB官方网站,这里就不介绍了。
直流调速系统
直流电动机的稳态转速方程可表示为:
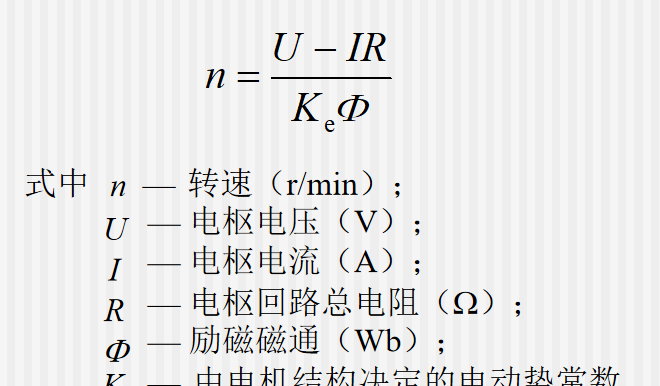
根据上述公式,从数学角度上讲,直流电机的调速方法有三种:
(1)调整电枢电源电压U。
(2)减弱激励磁通φ。
(3)改变电枢电路电阻R。
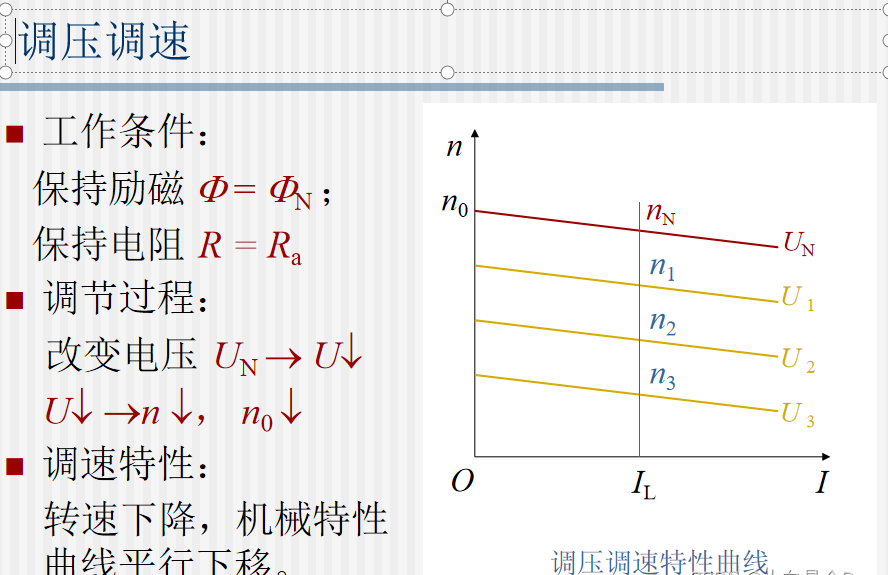
由于智能车比赛中的电机已经规定好了,方法2、3显然不可行,只剩下方法1了,所以智能车的速度控制采用变压调速来实现。
桥式可逆PWM变换器
此直流调速系统知识点较多,由于智能车上几乎都采用PWM加全桥的方式,因此这里只分析桥式可逆PWM变换器。
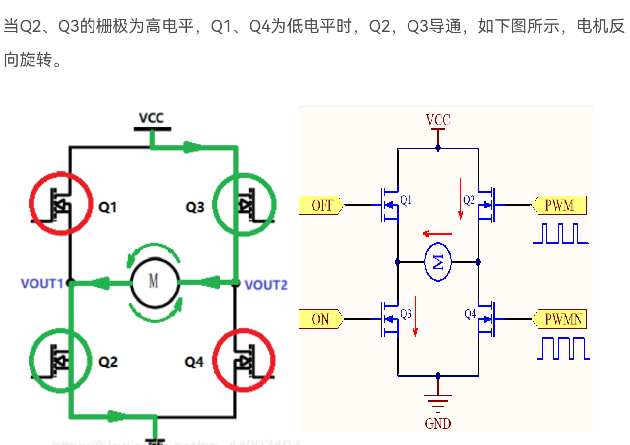
可逆PWM变换器主电路有多种形式,最常用的是桥式(又称H型)电路如下图所示:
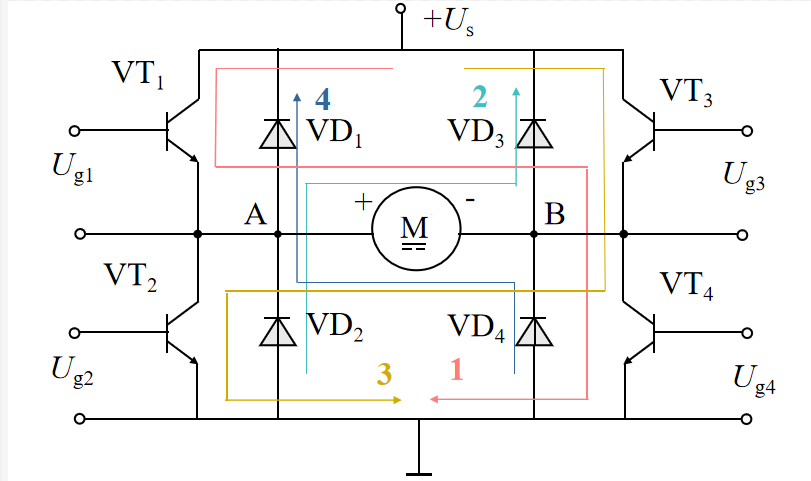
电机M两端电压的极性随开关器件栅极驱动电压的极性而变化。控制方式有多种,如双极性、单极性、有限单极性等。这里我们分析双极性控制的可逆PWM变换器。需要说明的是,单极性控制在智能车上应用较多,大体过程与双极性类似。
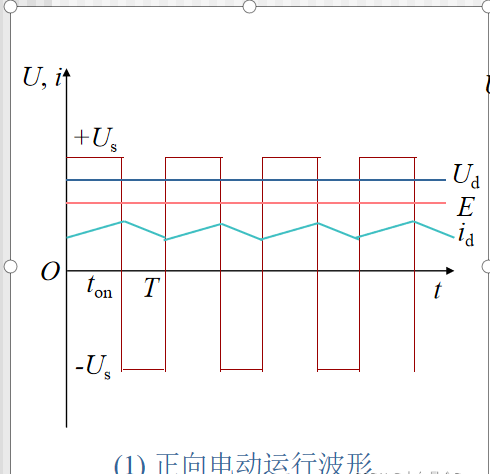
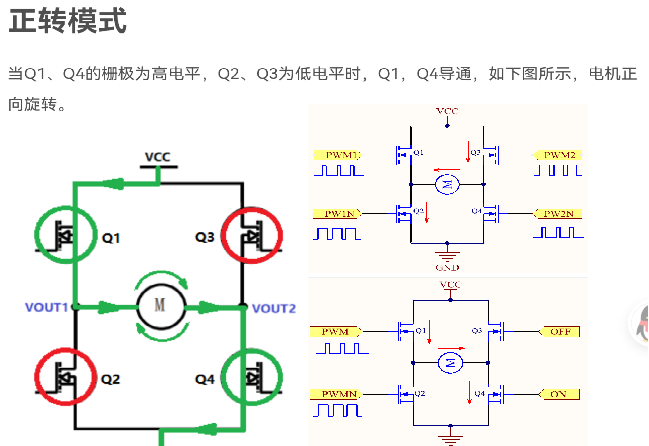
(1)正向操作
第一阶段,在0≤t≤ton时间段内,Ug1、Ug4为正,VT1、VT4导通,Ug2、Ug3为负,VT2、VT3截止,电流id沿回路1流动,电动机M两端电压为UAB=+Us;
第二阶段,在ton≤t≤T期间,Ug1、Ug4为负,VT1、VT4截止,VD2、VD3继续通电,并被钳位,保持VT2、VT3截止,电流id沿回路2流动,电机M两端电压为UAB=-Us;
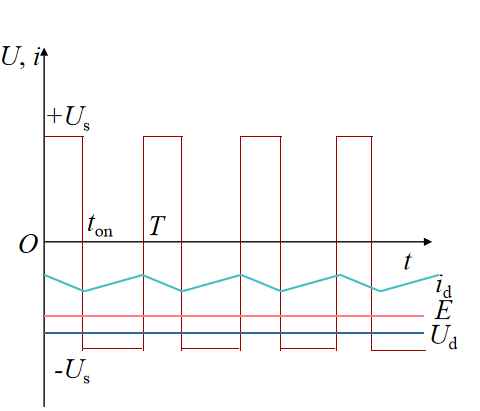
(2)反向运行
第一阶段,在0≤t≤ton时间段内,Ug2、Ug3为负,VT2、VT3截止,VD1、VD4续流,VT1、VT4箝位截止,电流-id沿回路4流动,电动机M两端电压为UAB=+Us;
第二阶段,在ton≤t≤T期间,Ug2、Ug3为正,VT2、VT3导通,Ug1、Ug4为负,VT1、VT4截止,电流-id沿回路3流动,电机M两端电压为UAB=-Us;
整个电机控制的流程图如下:
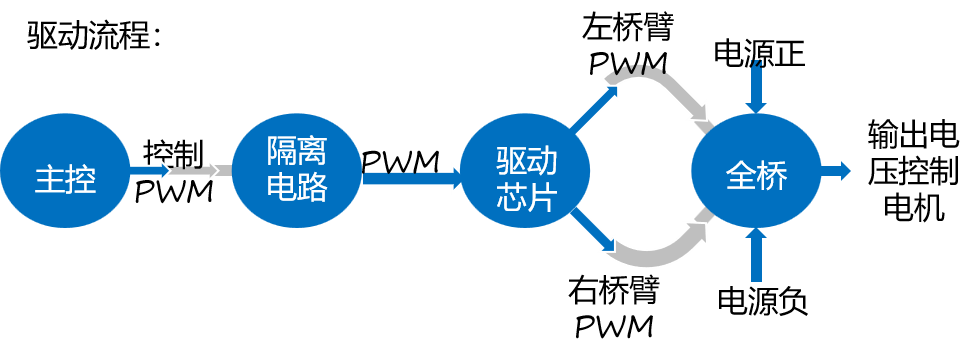
这个跟硬件部分的电机驱动有关,大家可以根据硬件部分去参考大佬们的相关博客文章。
总结
智能小车电机控制入门到此结束,由于运动控制课程知识点太多,无法全部呈现给大家,所以作者根据自己学到的知识写了此文,仅供参考。
做这个系列的初衷是希望大家能够了解智能汽车涉及的学科领域。诚然,现在市面上已经有很多现成的解决方案,入门难度相对降低了。但是,面对现成的解决方案,大家是不是应该先深挖一下方案的原理和理论呢?
智能车大赛不是参数调校大赛半岛·综合体育官网入口,也不是模块组装大赛,希望大家能够好好利用时间,将理论知识与实践相结合,笔者认为比赛的真正目的是让大家能够更好地掌握理论知识,而不是一味追求名次。
版权声明:本文为CSDN博主“潇湘是个Der”的原创文章,遵守CC 4.0 BY-SA版权协议,转载时请附上原文出处链接及本声明。
原文链接:
↑热门课程、限时优惠券!立即领取↑


 鲁ICP备18019460号-4
鲁ICP备18019460号-4
我要评论