星空综合体育app下载 第十九届全国大学生智能汽车竞赛-竞速比赛模型组比赛细则

版本发布时间更新内容V1.02023年11月27日发布首版全部模型组规则
01完全模型组一、比赛构成
百度完全模型竞速赛事包含三个环节,分别是网络预选赛、实地区域赛以及全国最终赛,赛事组委会会综合考量网络预选赛与实地区域赛的表现,以此决定全国最终赛的参赛资格,其中网络成绩的比重为十分之一,实地成绩的比重为九十之九,赛事组委会将随机挑选至少一百所报名参加网络预选赛的学校,给予其免费使用百度EdgeBoard计算卡的资格
二、车模
车模选用 I 型车模,需要亲手打造车模的外壳,制作好车模之后,对于车模的规格没有约束。
三、微控制器与传感器四、赛道与线下比赛任务
线上资格赛的说明文档,提交的途径,以及评分的排行,都会在AI Studio上公布。
五、赛道与线下比赛任务
比赛赛道由室内循环赛道改造而成,赛道内部未设置电磁导向装置。赛道两侧增设了多种附加设施。具体比赛目标与实施细则,请参照《 第十九届全国大学生智能车竞赛完全模型组比赛细则 》进行了解。
02比赛规则一、比赛场地1、比赛环境
赛道环境与竞速室内赛道相同。
2、比赛场地(1) 比赛场地
该比赛赛道以室内环形跑道为基准,保持跑道材质和规格完全相同。在引导方法上,完全照搬室内环形跑道的引导方式,同时增设完全模型组任务指引标识和锥形桶,用以引导车模顺利达成完全模型组赛段目标。
(2) 赛道标志
为了确保比赛顺利进行,赛道上任务点和特殊区域附近的指定位置设置了立体指示牌,这些指示牌面向车辆行驶方向,角度与右侧正面图中的指示角度一致,摆放误差控制在正负十度以内。
组委会会另外公布规范的3D打印STL资料、可打印的PDF文档以及各种构造的图样和数据,各参赛队伍能够自主制作并选用颜料或喷漆进行着色。颜色标注需以“三和”品牌自喷漆色号为标准。
实体标志的样式和含义如下所示:
Ⅱ.危险区标志
图1.2.1 危险区标志
Ⅲ.救援区标志
图1.2.2 救援区标志
Ⅳ.坡道标志
图1.2.3 坡道标志
Ⅴ.追逐区道具小车

图1.2.4 拥堵区道具小车
(3) 任务锥桶和路障Ⅱ.任务锥桶
赛场除了常规跑道外,另设有特殊活动地带,该地带借助可挪动的锥形物,在主跑道的内部及周边临时构建而成。

图1.2.5 锥桶
这种桶状物是用塑料制成的,整体呈现单一黄色,上面没有任何图案或文字。它的底部最宽处是75毫米,整个高度也是75毫米。赛道布置好之后,这个桶不会固定在地面上星空综合体育app下载,可以自由移动。
Ⅲ.路障
赛道内部障碍物采用长方体形式,其规格与标准砖块一致,长宽高分别为240毫米、115毫米和53毫米,整体呈现黑色,与赛道核心区域间隔10厘米。
图1.2.6 路障示意图
二、比赛任务
本次全要素模拟场地设定为“反城市恐袭”场景,要求特种智能车在城镇中开展巡查作业,车辆既要能自动行驶于普通路段,也要能依据途中所遇任务符号所象征的紧急状况,驶入特定地段,并依照规定程序通过。
参赛者组装的模型车从起点处斑马线前方一米区域,将四个轮子放置在赛道上开始行驶,绕行赛道一圈。模型车要依次经过道路上的各种构造物,辨认路边的指示牌,才能通过特殊的路段。
比赛开始于车模经过人行横道,结束于车模再次经过人行横道。若车模未能停在人行横道后1.5米路段以内,则比赛时长需增加五秒作为惩罚。
车辆在穿越危险地带、救助地带、倾斜路面以及追击地带等四个特殊区域时,一旦驶离跑道无法返回赛道或停留在赛道上无法继续行进,即判定为通行失败,此时驾驶员可以实施手动救援,将车辆重新放置于该特殊区域的后方位置重新启动,每次比赛仅允许应用一次手动救援,救援操作之后需要额外增加三十秒钟的罚时。赛道上除前面提到的范围之外的地方,如果车模的两个轮子同时离开了赛道,或者停在了赛道上导致无法再行驶,那么这次比赛就算失败了,所记录的成绩也不算数。
危险地带、救援地带、斜坡地带、追击地带这四段特殊区域,除了中间有障碍的部分,还涵盖前后六十厘米的直线地带,手动取车和放车的地点都必须在这个范围内,如果超出这个地带去取车,比赛就会算作失败,这次得来的成绩也作废。
1、危险区
车模抵达险境,参照图中右侧路边爆物警示牌指引,此地带须绕开地面阻碍物,该处道路两侧随意摆放着交替的彩色桶和隔离墩,相邻两个物件相距三十至六十公分,指令车模在未触碰彩色桶的前提下通行,若撞击每个彩色桶且致其偏移超出桶体半径,则需加罚五秒时间;隔离墩设置在区域末端,与赛道固定联结,触碰它不会导致时间惩罚。图中每个黄色圆圈代表1个小锥桶,黑色方块为路障。
图2.1.1 危险区示意图
这个装置是用3D打印件和绝缘胶带拼装而成的,主体呈现大红色和黑色两种色调,整体长120毫米,宽80毫米,高70毫米。
图2.1.2 爆炸物标志
2、救援区
车模开到救援地带,看路边的指示牌,如果是普通伤员,就要完全进到左边那些桶圈起来的地方,停一小会儿再开;如果是危险分子,就要完全进到右边那些桶圈起来的地方,停一小会儿再开;要是没停就完,要扣十五秒;要是没停稳或者停错地方,要扣五秒;要是撞到桶,还把至少一个桶弄得挪动了半径那么远星空体育app官方下载,要扣五秒。四个轮子全部驶离赛道,进入由锥桶构成的方形地带,就算彻底进入,只要有一个轮子还在场地外,就表示没有完全进入。
图中每一个黄色圆圈象征一个锥形桶,实际布置时这些桶的中心点并不处在同一条直线上,桶与桶之间的距离也并非完全相等,这些偏差都在锥形桶半径的界限之内。
图2.2.1 救援区示意图
救援区指示物包含两类,一类是用于指示平民伤员的,另一类是用于指示危险个体的,这两类指示物各自都有两种不同的图形,指示牌的底部宽度为70毫米,指示牌的直径为120毫米,指示牌中心的垂直高度为120毫米,这些指示牌是由3毫米厚的铝合金板制成的,图形是通过贴纸粘贴在指示牌上的,比赛开始前,裁判会在四种图形中随机挑选一种,并将其放置在救援区赛道旁边指定好的区域里。标牌摆放时与赛道方向垂直,摆放偏差不超过±10度。
图2.2.2 平民伤员标志物
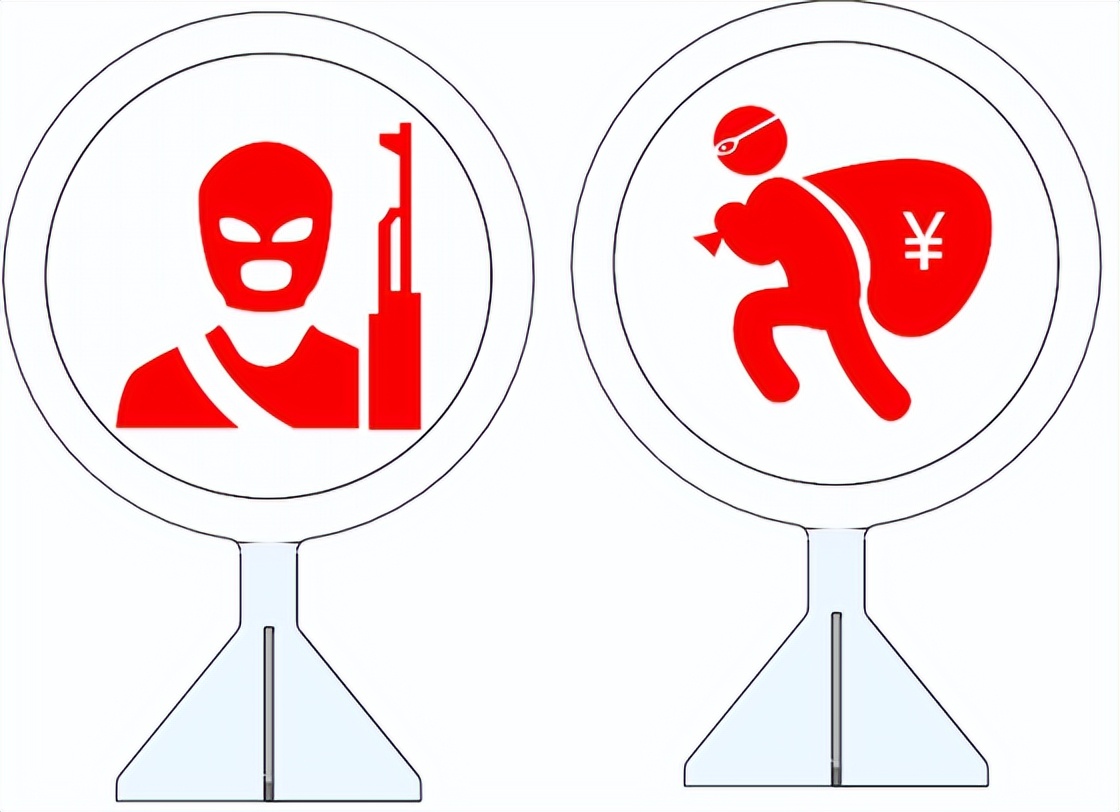
图2.2.3 危险人物表标志物
3、坡道
场地设有倾斜路段,务必小心驾驶,参照图示,该路段前方右侧放置了实体斜坡指示牌,车辆识别标识有助于提早发现斜坡,进而自行决定驾驶方案。
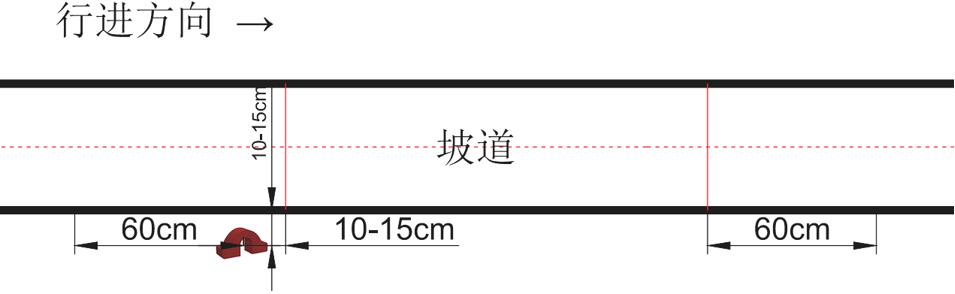
图2.3.1 坡道示意图
4、追逐区(仅国赛)
赛道设有特定区域用于追逐活动,该区域内放置着道具汽车,通常安放于行车道旁侧,可能是左侧也可能是右侧,道具汽车会静置不动,一旦车模经过感应点,它便启动并朝直线方向以每秒0.1至0.3米的稳定速度前移,道具汽车分为三种模式,分别是常规车型、可疑车型以及高风险车型。在追赶一般车辆时,要避免和辅助车辆相撞;在追捕目标车辆时,要开到其他车辆前面进行拦截,并让辅助车辆停止移动;在追击高风险车辆时,必须撞击辅助车辆;如果操作不在规定动作内,或者操作失误,将扣除十五秒时间。
赛道上可反复遇见追逐元素,仅限于全国比赛场合。道具小车的感应距离等具体数值稍后公布星空体育官方网站,小车活动界限
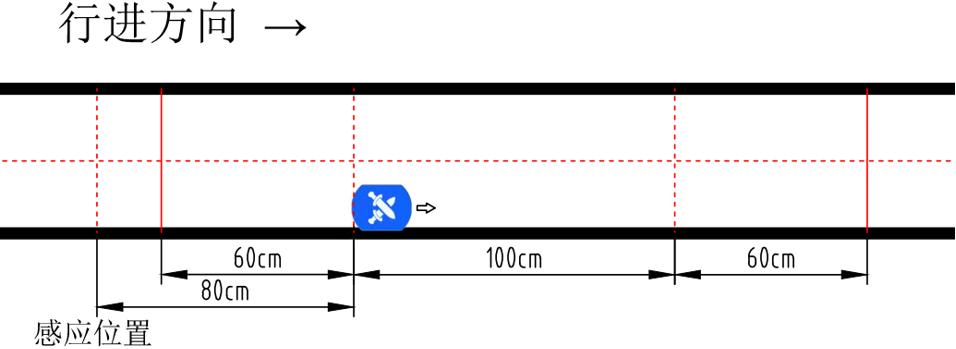
图2.4.1 追逐区示意图
小车内部配置了驱动装置和能量储存单元、感知元件、调控系统,可以侦测到碰撞并终止行进,该车的轮廓规格为150毫米乘以115毫米乘以65毫米,其外部壳体采用增材制造技术成型,涂装色为特定的亮丽蓝色调。

图2.4.2 道具小车外形示意图

图2.4.3 道具小车类型示意图
三、车模技术要求1、车模平台
车模可以使用竞赛指定的I型车模。
模型车体必须配备外壳,确保外壳的完好与外观。外壳必须完全覆盖车身,包括底盘外沿、四个轮胎以及超出外壳的传感器和固定装置,从正面、侧面和顶面观察时,不能看到车体内部构造。为了便于调试和电池更换,外壳可以设计成整体或部分可拆卸的结构,但在行驶期间必须维持外壳的封闭状态。制作车身的外壳时,材料的选择不受约束,但必须确保安全性能,不能有坚硬锋利的表面特征,以免危及场地使用者和周围的人。
车模的更多具体调整细节,请查阅先前公布的《 第十九届全国大学生智能车竞赛竞速比赛规则 》的附件二:车模调整规范。
车模作品完成之后,车模的尺寸没有限制。
2、微控制器
车模赛道特征侦测判别,必须借助百度EdgeBoard运算板实现,仅能配置一个,规格限定为EdgeBoard竞赛专用板(首选)、FZ3B竞赛特别版。车模控制核心选用英飞凌(Infineon)或恩智浦(NXP)制造的控制器,具体规格请参考《第十九届全国大学生智能汽车竞速比赛规则》,以此为基础构建车模的驱动管理电路,实现精准的运行控制
该模型算法需依托百度Paddle框架构建,即必须借助百度深度学习平台的人工智能算法来完成。由于学生个人设备可能存在不足,组委会特设统一线上算力平台AI Studio(https://aistudio.baidu.com/)供大家使用,用以训练模型。
3、传感器
车模作品在赛道识别方面有限制,最多只能配备两个摄像头,这两个摄像头必须直接连接到EdgeBoard计算卡上,以便对赛道及其构成元素进行检测,如果需要更多接口,可以通过HUB来拓展USB端口实现直连。
车模作品可以借助非摄像头类的感应设备来探测周边环境,同时也能用于调整车辆的姿态和操控方式,不过不能用来辨认赛道构成部分,例如平直路段、弯曲区域和倾斜路面等,也不可以用来识别赛道上的指示标志,所选用的感应设备或者其他电子装置中,不允许含有独立的微型处理器,只有超声波感应设备不受此限制。
4、软件开发工具
能够选用C语言或C++语言,抑或是Python语言,均可用于实现车辆模型内软件的构建。
有关汽车模型的额外条件,请参照第十九届全国大学生智能车竞赛竞速比赛规则中规定的标准执行。
参考资料
第十九届全国大学生智能车竞赛的完全模型组比赛规则发布在以下网址,具体内容请查阅:https://zhuoqing.blog.csdn.net/article/details/134331321。
 鲁ICP备18019460号-4
鲁ICP备18019460号-4
我要评论