暗网下载 智能车竞赛技术报告 | 双车接力组 - 沈阳航空航天大学 - 精神小车成双 - 双轮车

学 校:沈阳航空航天大学
队伍名称:精神小车成双队
参赛队员:李明沂 余冬 田祺春 顾诗渤
带队教师:胡乃瑞 邵清亮
引言
“恩智浦”杯全国大学生智能汽车竞赛,是由教育部高等学校自动化专业教学指导分委员会主办的科技竞赛,至今已成功举办十六届,竞赛过程涵盖理论设计、实际制作、整车调试、现场比赛等环节,要求学生组队协同工作,初步感受一个工程性研究开发项目从设计到实现的全过程。该竞赛将科学性、趣味性以及观赏性融合在一起,它以汽车电子为背景,汽车电子发展迅猛且前景广阔,此竞赛涵盖自动控制、模式识别、传感技术这些方面,同时还涉及电子、电气、计算机、机械与汽车等多学科专业,是一场创意性比赛。该竞赛规则透明,评价标准客观,秉持公开、公平、公正的原则,努力朝着健康、普及、持续的方向发展。
概述
这份文本,对沈阳航空航天大学的“精神小车成双队”,在第十六届“恩智浦”杯全国大学生智能汽车竞赛里的双车会车组,其系统方案做了详尽介绍 。本次比赛采用大赛组委会统一指定的D型车模,该车模以灵动微电子公司生产的单片机MM32PIN27PS作为核心控制器,规定智能车要依照赛道来进行寻迹,于三岔路口开展接力并传递直径不小于4cm的乒乓球。智能车借助电感检测赛道上的电磁线,凭借超声波进行测距,通过无线串口达成两车的通信,利用陀螺仪控制车的姿态,运用PID控制算法调节电机的转速。为提升模型车的速度与稳定性,借助上位机、按键OLED模块等调试工具,开展了大量硬件与软件测试。实验结果表明,该系统设计方案确实可行。
第一章 方案设计 1.1 整车设计思路
本届智能汽车比赛,涉及我队双车接力组别,本组车把MM32PIN27PS用作核心控制单元,在循迹传感器方面,利用电感和电容谐振去检测100kHZ电流产生的磁场,车身转向控制方面,将电磁信号强度当作转向反馈,鉴于平衡车具有特殊性,车身于循迹前进进程中,得始终保持车身的平衡,依据最基本保持车身平衡的原理,我们要晓得车身当前的角度以及角速度。于是,在维持车身平衡这方面,我组认定将陀螺仪当作角度传感器,该陀螺仪的型号是ICM - 20602;于赛题任务这儿,用上两个磁性不一样的磁铁来传球,凭借超声波探测两辆车之间的距离,借由串口达成两辆车之间的通信。
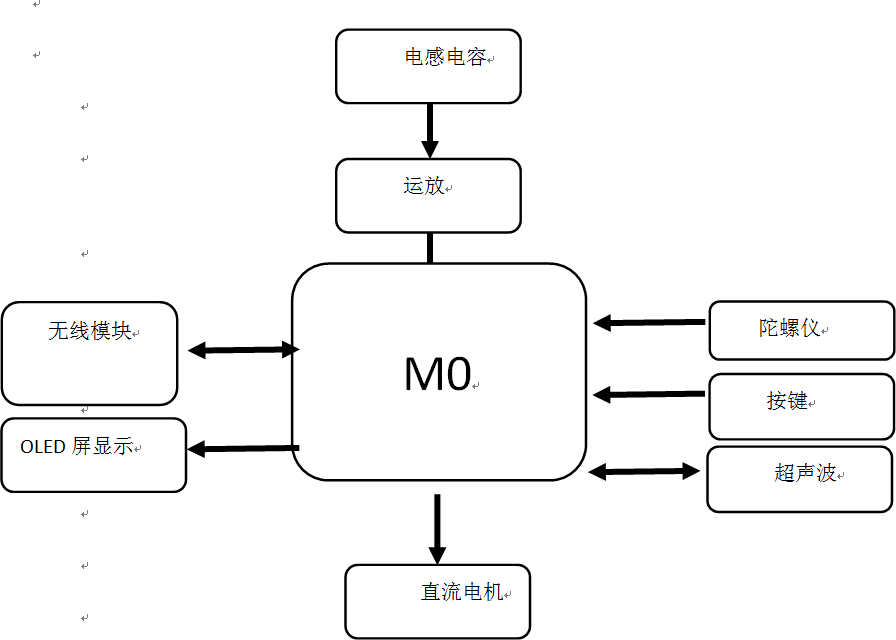
图1.1 整体结构框图
第二章 智能车机械结构设计 2.1 智能汽车车模的选择
这次比赛可供选择的车模存在D车以及E车,E车相较于D车,其长度更长,并且有着更为宽阔的轴距,这次比赛所设定的规则对车模长度给出明确限定,要求车模长度需处于30cm之内,D车与E车这两辆车各自具备优点与缺点,从整体情况来观察,二者之间的差别并非特别显著,基于此,在这里是选择了更为矮小且简洁的D车模,如此一来便能够方便地把车模长度控制在30cm以内。
2.2 智能汽车安装 2.2.1传球装置的安装
在传球进程里面,两轮车作为后面那辆车(接球的车) , 传球的计划是借助磁铁磁性强度情况 的差异,于两轮车的尾部位置安装一块具有强磁性的磁铁,而在三轮车上所安装的是带有弱磁性的磁铁,如此一来,两轮车能够把三轮车上黏附着铁片的小球吸附到两轮车上,具有强磁性的磁铁安装于两轮车的尾部(如同图2.1所显示),。
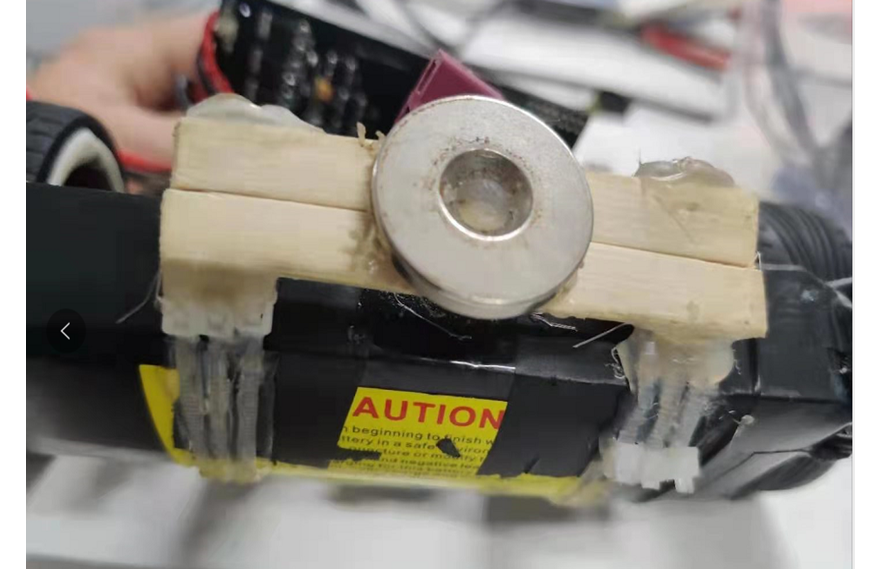
图2.1 2.2.2电感的安装
电感是智能车寻迹得以保证的因素,其距离机械零点较远,对重心影响较大,故我们选用质量轻且硬度较高的碳杆作为主体,要在上面将8*10的工字电感固定好,使其方向与前瞻电感架平行,并联上矫正电容,之后连接到主板的电磁运放部分。如图2.2。

图2.2 2.2.3车模姿态传感器
至于直立车而言,陀螺仪属于相当关键的一个模块,得确保它不会因安装不牢固进而转动,以免影响直立环,故而将它单独固定于车模底板之上,接着采用热熔胶进行固定,以此保证检测数据具备可靠性。电感线圈的安装呈现如图2.3所示的状况。
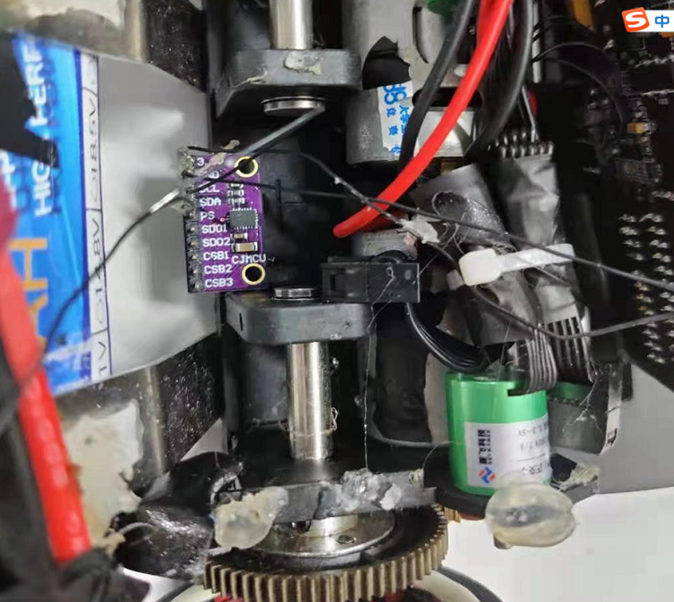
图2.3 2.3重心的调整 2.3.1电池的安装
整个车模所有元件里,电池是最重的部分,对于电池,我们挑选质量轻且性能好的7.4v锂电池,其容量为5200mA.h,属于大容量,在此之前我们选用的是智能车专用的镍铬电池,经过测试发现,使用该电池时间稍久后,会发觉直立车在过弯时,因电池瞬间供电不足,致使过弯时自立车低头,进而导致车的稳定性下降,电池的安装方面,电池支架也是关键的一环,电池支架最好能让智能车整个中心更为集中。考虑到车子具有怎样的稳定性,在要保证车模能够顺利去通过坡道的这个前提条件之下,我们尽最大可能去加以降低车子之重心。与此同时,要均匀车身重量,要使得重心处于整车的中轴线上。因为靠前的重心会对小车平衡位置产生影响,而靠后的重心又会致使出现侧滑情况。最终,电池的安装是像图2.4那样。
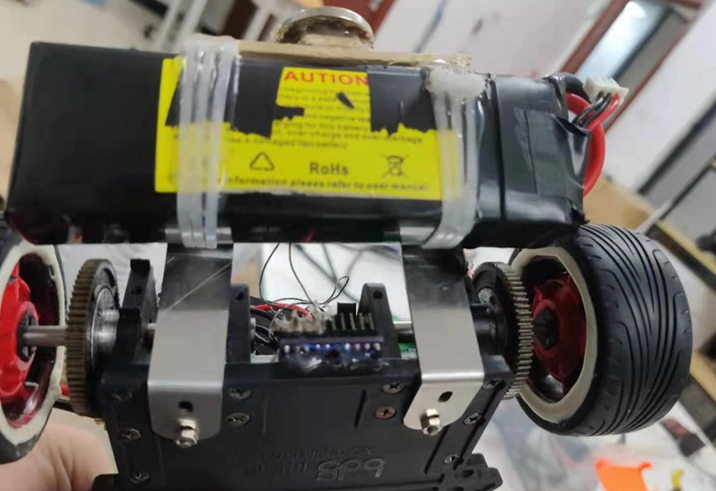
图2.4 2.3.2配重的安装
由于存在直立环,智能车设定目标角度后,重心越是低于目标角度 ,也就是智能车重心靠前,车模就会拥有更快速度,能依据自身需要调整重心,在两轮车适合位置安装恰当配重就行。如图2.5所示。

图2.5
第三章 智能车硬件电路设计
印刷电路板是玻璃纤维版,它镀了铜,由环氧树脂粘合而成。蚀刻掉部分镀铜之处,留下仅是以用于构成电路互连通路的铜层走线。印刷电路板存在单层的情况,也有双层的情形,或是四层、六层、八层、十二层,甚至存在更多层数的状况。要是层数多,连接的布线就会越便利,不过成本却会越高,调试也会越困难。倘若印刷电路板具备专用供电层以及接地层,那么系统将会拥有更强的燥声抗扰度。用到电子设计自动化软件之时,像 DXP 这类的,去设计 PCB 的期间,要留意下面几个方面所涉及的问题 。
3.1 PCB 板布局
走线正式开展之前,需针对PCB的整体格局予以谋划。布局规划应当依照以下基本准则。
第一步,在进行 PCB 布板之前,要先把相应的原理图打印出来,接着,依据原理图来确定整个 PCB 板的大体布局,也就是各个硬件构件的位置安排,这是第二步。
(2)倘若 PCB 板的形状没有其他特别要求,通常情况下它是矩形,其长与宽的比例为 4 比 3,或者是 3 比 2。
(3)考虑面板上元件的放置要求。
(4)考虑边缘接口。
3.2元件放置
元件放置,要求得是整齐,要尽可能地正放,那些属于同一硬件构件内的元件,要尽可能地排放在一块儿。
使排列方位往最大程度与原理图保持一致,布线方向以与电路图走线方向相符为佳。元器件于PCB上的排列能够选用不规则、规则以及网格这三种排列方式当中的任意一种,也能够同时运用多种。不规则排列:元件轴线方向彼此之间呈现不一致的状况,这样对于印制导线布设而言是便利的,并且平面利用率较高,分布参数较小,着重对高频电路有着益处。规则排列:元器件轴线方向排列达成一致,布局具备美观整齐的特点,然而走线较长并且复杂,适宜用于低频电路。网格排列,其中每一个安装孔,都被设计在,正方形网格的交点之上。对于布局的元器件,应当有利于,发热元器件进行散热。在高频情况下,需要考虑,元器件之间的分布参数。高、低压之间,要进行隔离,而隔离距离,与所承受的耐压,存在关联。
(2)电容的位置得格外留意,电源模块那儿的滤波电容,需靠近电源放置,而IC的滤波电容,则要靠近IC的引脚,这一点重要至极。
(3)要考虑元件之间的距离,以此来防止元件之间出现重叠情况。这之外,还要考虑元器件的引脚间距,由于元器件存在差异,所以其引脚间距也不一样,在PCB设计当中,必须要弄清楚元器件的引脚间距,原因在于它决定着焊盘放置间距。对于非标准器件引脚间距的确定,最直接的方法便是:使用游标卡尺来进行测量。
(4) PCB 四周留有 5-10mm 空隙不布器件。
先把占用面积大些的元器件进行放置,先是集成的方式再是分开的形式,先是主要一方面而后是次要另一方面,遇到有多块集成电路情形时要先放置主电路喔。
(6)可调元件要放置于便于调节之处,质量超出15g的元器件要用支架,热敏元件要远离发热元件。晶体要平放,而非竖直放置。
(7) PLL 滤波电路应尽量靠近 MCU。
3.3 主控芯片的选定
本次比赛能选用的芯片存在 M0 和 M3 两款,M0 的频率是 90MHZ,M3 的频率是 120MHZ,鉴于前期未曾察觉到芯片的重要意义,以及 M3 芯片存在短缺状况,我们挑选了 M0 芯片,M0 芯片在各个层面相较于 M3 都要显得逊色,这后来变成了我们提速的一个重大阻碍,所以在此建议大家要是有较高的目标,一定要选用性能优良的主控芯片。
3.4电源设计 3.4.1 5v电源模块
有一种5v稳压模块,它是依据SPX2940来进行设计的,这个电路涵盖了滤波的过程,还包括稳压的过程,SPX2940具备输出固定的特性,同时它响应快,经过电容滤波之后,能够稳定地输出5v电压,它的电路图如图3.1所示。

图3.1 3.4.2 3.3v稳压模块
为确保摄像头能够正常运行,还要保证运放可以正常工作,同时芯片也要正常运行起来,这时就需要稳定的3.3v电压,这个3.3v电压是基于RT9013进行设计的,此电路涵盖了具有滤波作用的相关过程。此电路还包括稳压的那些过程。为了保证同一个3.3v稳压模块不会出现负载过多的情况,我们采用了多个3.3v模块,这些模块的原理都是相同的。其电路图呈现为如图3.2所示的样子。

图3.2 3.4.3 运放的设计
以OPA - 4377为基础做的运放设计,OPA377系列属宽带CMOS放大器,能提供极低的噪声,还有非常低的输入偏置电流以及较低的失调电压,并且一边呈现出安静状态下电流仅0.76mA(典型数值)来工作。OPA377运算放大器是针对低电压、单电源应用做专门优化的。其交流性能和直流性能有着很棒的结合,所以在各种应用里是理想选择,这其中涵盖小信号调理、音频方面以及有源滤波器。N通道的OPA4377采用TSSOP - 14封装形式。它的电路图就如同图3.3 。
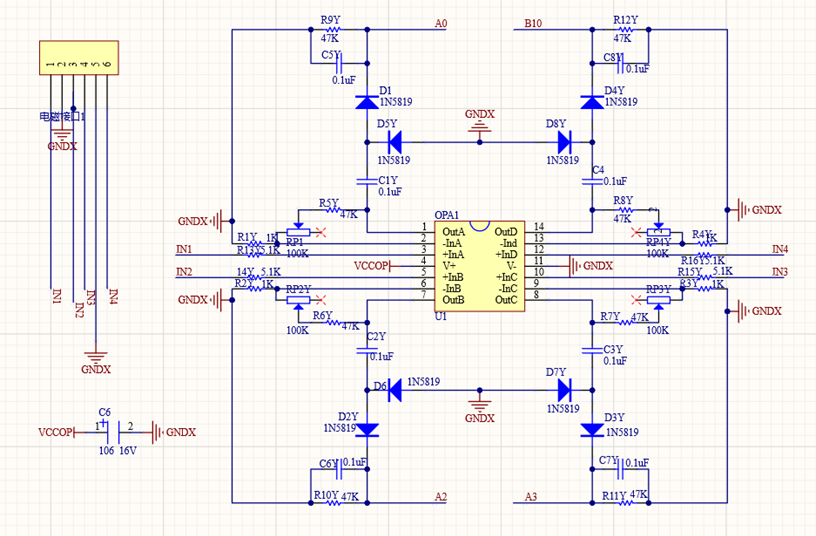
图3.3 3.4.4驱动的设计
比较容易出问题的一部分是驱动部分,对于芯片的选择、原理图的设计、pcb的布局以及布线都有着较高要求。挑选的驱动芯片是HIP4082IBZ,其中包含HIP4082全桥驱动原理图与驱动,HIP4082属于专为中频、中压h桥N通道MOSFET设计的驱动IC,能够提供16个铅塑料SOIC (N)以及DIP封装形式。针对PWM电机控制和UPS应用而言,HIP4082 h桥驱动能让基于桥的设计兼具简单与灵活两大特性。该设备操作电压高达80V,最适用于中等功率级别的应用。首先,电路中单片机能够输出直流信号,然而其驱动能力有限,所以通常由单片机输出驱动信号,去驱动诸如Mos管这类大功率管,进而产生大电流以驱动电机,并且占空比大小可通过驱动芯片控制加在电机上的平均电压来达到转速调节的目的。电机驱动主要运用N沟道MOSFET构建H桥驱动电路,H桥是典型的直流电机控制电路,因其电路外形类似字母H,故而被称作“H桥”啦。4个开关构成H的4条垂直的腿,电机则是H里面的横杠。要让电机运转,就得使处于对角线上的一对开关导通,借助不同的电流方向去控制电机正反转。驱动部分的电路图展示在图3.4那里。
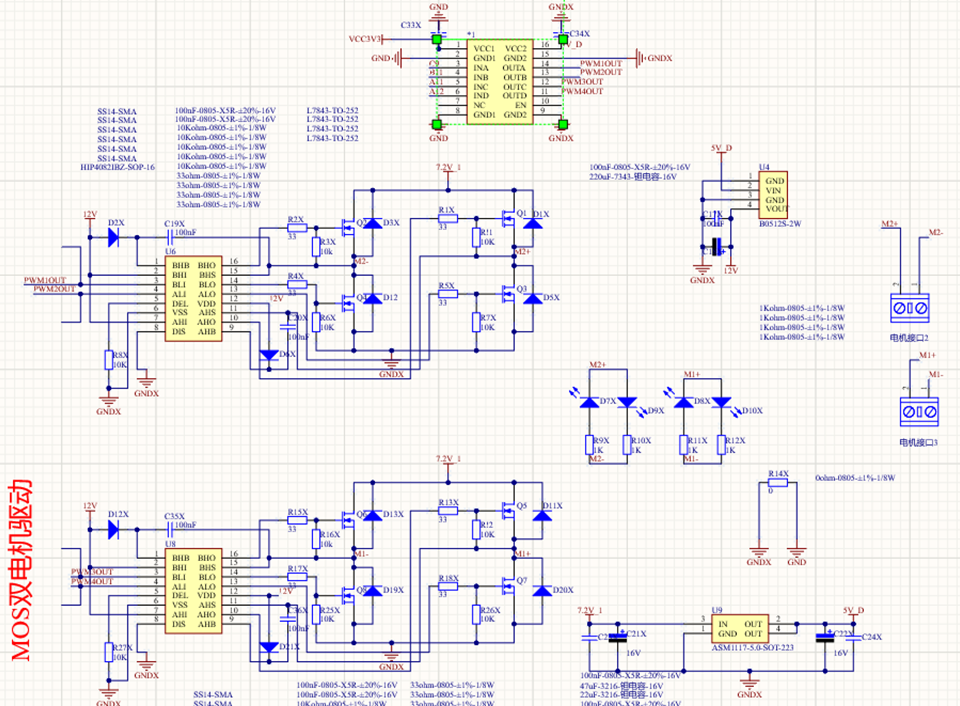
图3.4
第四章 智能车系统程序设计
直立电磁车,先是开展各模块初始设置,于主函数相关语句中判定是否有拨码开关动作,检测按键状态而后实现OLED显示,主系统的时间周期是5ms,接着开展AD采值并用于数据之处理政,随后开展小车姿态状态数据采集工作,并以5ms为间隔控制电机工作内容,程序当中的流程情况如同图4.1所呈现的那样。
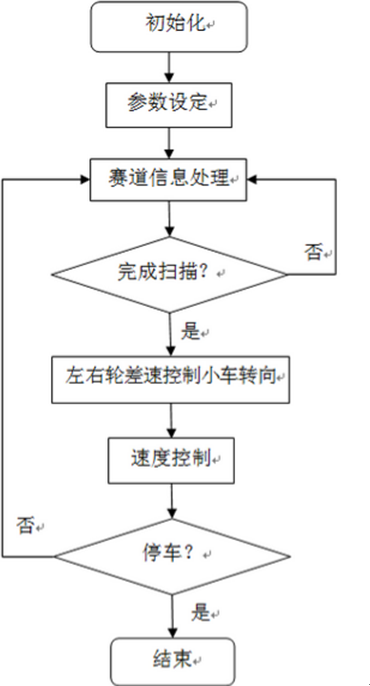
图4.1 4.1特殊赛道识别及处理
本届比赛赛道元素增添了新型元素,即三叉路口,该元素的增添致使赛道的识别难度大幅提高。三轮总共要经过元素坡道,环岛以及新增的三叉路口。
4.1.1坡道识别
凭借陀螺仪来识别坡道,借助陀螺仪的积分以判定进入坡道,进而采取抬高角度的举措,确保不会出现飞车状况,最终达成顺利通过坡道 。
4.1.2环岛识别与处理
我们的三轮智能车,通过采取电感来进行识别,环岛跟其他元素相比较,仅有一个显著的特征,也就是左右两侧电感的电压,都会比正常循迹时的电压要大,依据此情况能够判断出环岛元素,接着采取取特征值的方式,使小车进到环岛,出环岛要借助陀螺仪进行积分,当达到目标积分的时候就出环岛。
4.1.3三叉路口识别
三叉路口运用电感来识别,是因为有两条电磁线会分别进入一个三叉路口,如此一来三叉路口的电感就会相对较小。鉴于这种条件太过简单会导致出现多处误判,所以我们进一步细化三叉路口的电磁条件,增添一些识别先后顺序的条件,当接收到三轮信号完成传球动作时,才开始发车,进而使三叉路口的识别变得更加完善 。
4.2 PID控制算法介绍
包括平衡控制、方向控制以及速度控制的控制算法,平衡控制运用的是PID控制,方向控制运用的是位置式PD控制,速度控制运用的是增量式PD控制。为比例、积分、微分控制的PID控制,在工程实际当中应用颇为广泛。具有结构简单、工作可靠、便于调整、性能稳定诸多优点的,是PID控制算法 。
4.2.1 PID控制算法简介
PID调节,它缩自Proportional(比例)、Integral(积分)、Differential(微分)这三者,是一种过程控制算法,意味着将误差信号(采样信号与给定信号的差)。经过比例运算后的结果,再经过积分运算后的结果,接着经过微分运算后的结果,作为输出控制信号,以此来控制所要控制的对象 。
比例调节的作用在于,按比例来反应系统之中存在的偏差,只要系统出现了偏差,那种比例调节作用就是用来减弱偏差的。比例作用要是很大能加快调节,从而减少误差,然而过于大的比例会造成系统稳定性降低,甚至致使系统变得不稳定。
积分调节作用,是要让系统除去稳态误差,提升误差程度。要是存在误差,积分调节便会开展,直至不存在误差,积分调节才会停止,积分调节输出一个常值。积分作用的强弱乃是取决于积分时间Ti,Ti越小,积分作用就越强烈。相反Ti大的话积分作用就微弱,加入积分调节会致使系统稳定性降低,动态响应变得迟缓。
4.2.2 PID参数整定
控制系统设计的核心内容,是PID控制算法中PID参数的整定,此过程是要依照被控过程的特性,去确定PID控制器的比例系数大小,还要确定积分时间大小,并且确定微分时间大小,。
用于 PID 控制器参数整定的方法数量众多,归纳起来存在两大类,其一为理论计算整定,此方法得借助一定的数学模型,也就是依靠一定的模型展开理论计算,最终确定控制器参数,然而,经由理论计算方法所获取的数据常常无法直接应用于实际当中,它必须经由实际工程加以验证,还要进行调整以及进一步的修改,其二是工程经验整定,该方法主要依靠工程经验,直接于控制系统的试验里开展,并且方法简便、易于掌握,在工程实际中被广泛采用 。工程整定方法里,PID参数整定主要存在临界比例法,存在衰减法,存在反应曲线法。这三种方法各自拥有其特点,每一种方法所获取到的控制器参数,皆需要在实际运行当中进行最后的调整以及完善。除此之外,其共同的特点在于,都是利用试验,随后是按照工程经验公式针对控制器参数展开整定。
进行 PID控制器参数的整定步骤一般如下:
(1)、预选择一个足够短的采样周期让系统工作;
仅仅加入比例控制的相关环节,一直到系统针对输入的阶跃响应发生临界振荡的状况,记录下此时所对应的比例放大系数以及临界振荡周期,。
(3)、在一定的控制度状况下,借助公式进行计算,从而得出PID控制器的参数。
在实际运行状况之下,针对计算得出的PID控制器的参数,展开相应的调整 。
本系统的PID参数,是经由上位机调试而得到的,具体调试办法是,先把PID参数设定为经典参数,接着借助上位机去观察速度曲线,持续变更PID参数,一直到观察速度曲线时发觉其加减速时间十分短,超调量特别少,这就表明此时的PID参数已经基本上算是比较合适了,如此便确定出适合本系统的一组PID参数。
五.系统调试 5.1.软件开发工具
率先采用的是IAR Embedded Workbench,IAR Systems身为全球处于领先地位的嵌入式系统开发工具以及服务的供应商,公司于1983年创立,所提供的产品与服务涵盖嵌入式系统设计、开发以及测试的每一个阶段,嵌入式IAR Embedded Workbench能够切实提升用户的工作效率,借助IAR工具可极大节省软件调试时间,调试界面呈现如图2所示。
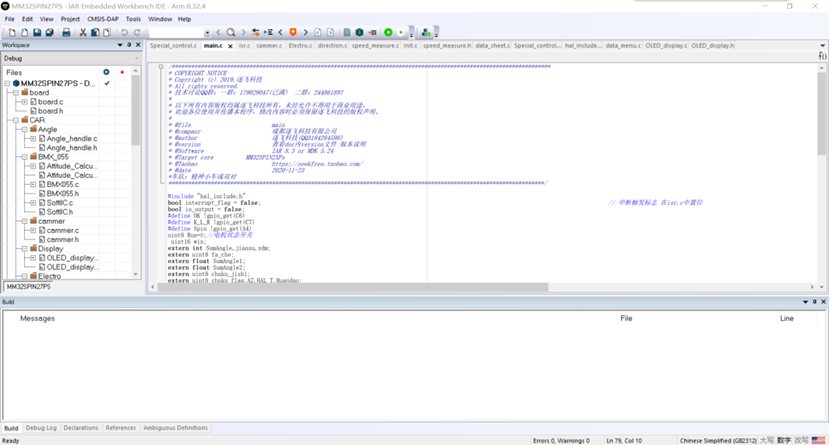
图2 5.2.液晶屏、按键调试
在小车调试这个过程当中,要以此来达到整定参数的作用,就需要不停地去修改变量的值 ,针对这个情况,我们选用了液晶配合按键以及拨码开关这样的调试办法。 除此之外,在比赛之时 修改变数,我们同样是借助这个组件来进行更改的 。
液晶我们选用OLED液晶,该液晶具有以下特点:
该物品尺寸小,其显示尺寸是0.96吋,模块尺寸约为29.5mm,29.5mm ,具备普通LCD所不能相比的体积方面的优势。
•高分辨率,分辨率为12864,显示效果远超过LCD。
•可以显示的数据更多,方便观察内部的变量的变化情况。
但同时,它的缺点也是显而易见的:
•价格远高于普通LCD,易损坏,质量不如普通LCD;
凭借高精度示波器去探测刷新时间,会消耗更多的单片机资料,液晶屏幕上每闪现变数数值一次需要1ms的时间,这对于具备高精度以及高实时性的智能汽车而言是极为不利的情况 。
最终,我们挑选了OLED液晶,更为注重变量可呈现数量以及体积所带来的优越性。刷新变量的频次同样是个极大的难题,故而通常要在软件里予以解决,一般而言,在小车行进过程中,液晶屏幕通常是要关闭的,唯有在需要修正参数或者查看参数之际才会进行显示。液晶模块如同图3所展示的那般:
图三
第六章 总结
在决定参与第十六届“恩智浦”杯全国大学生智能汽车竞赛后,我们小组成员开展查找资料工作,着手进行设计机构的事宜,开展组装车模的行动,开展编写程序的活动,开展分析问题的工作,智能车最终达成了稳定的性能目标,达成了快速的性能目标暗网下载,达成了简单的性能目标,最终确定了我们的作品。
在这份技术报告当中,我们着重介绍了为准备比赛而形成的基本思路,其中涵盖了机械范畴,电路领域,以及智能车的控制算法方面。
传感器布局时,我们剖析了前几届里呈现的电感排列方式,全面考量程序的稳定性与简便性,我们最终确定了当下的电感排列,经由反复实践明确了传感器的数量与位置,在软件方面持续完善控制算法,最终智能车于跑道上能够稳定达成自主循迹行驶 。
针对电路领域,我们采用模块类别归类方式,电源管理那个模块,电机驱动那个模块,接口那个模块,控制那个模块,信号采集那个模块,传感器那个模块都是各自单独去设计,依据查找资讯的情况各预备了几套方案,之后我们分别开展实验,最终按照报告里所提及的样式确定了我们最终的电路图 。
在算法相关方面,我们运用C语言来进行编程,借助比赛所推荐的开发工具去调试程序,经由小组成员持续不断地讨论、改进,最终设计出了一套相对比较通用的、稳定的程序。在这一套算法当中,我们依据路况对车速予以调整,达成直线时加速,处于弯道时减速,以此保证在最短的时间之内跑完全程。
先前备战时,场地获学校及系大力支持,经费亦如此。于此诚挚感谢始终支持且关注智能车竞赛之学校与系领导,还有诸位指导老师、学长。同时感谢比赛组委会举办此项意义非凡的赛事 。
当下,面临即将来临的大赛,历经历时将近一年的充足准备以及东北赛区赛的检验之后,我们存有信心在全国比赛里获取优异成绩。或许我们的知识并非足够丰富,思考问题也并非足够周全,然而这份技术报告作为我们小组辛劳汗水的结晶,凝聚着我们小组每一个人的心血跟智慧,伴随它的诞生,这份经验将会永远陪伴我们一生,成为我们最为珍贵的回忆。
参 考 文 献
刘南昌,李全,王宏,张楠,针对基于单神经元PID的直流电动机速度控制算法展开研究,该算法探讨成果发表于《五邑大学学报》,时间为2011年8月15日 。
候勇严,做了关于在2003年时,在陕西科技大学电气与电子工程学院,于陕西咸阳,对单神经元自适应PID控制器设计手段展开研究的郭文强 。
王渊峰,《Altium Designer 20电路设计标准教程》,科学出版社出版,于二零一二年一月一日出版发行 。
附录一 程序 【主函数】
#include "hal_include.h"
bool interrupt_flag = false; // 中断触发标志 在isr.c中置位
bool io_output = false;
#define OK !gpio_get(C6)
#define K_L_R !gpio_get(C7)
#define Spin !gpio_get(A4)
uint8 Run=0;//电机状态开关
uint16 win;
extern int SumAngle,jiansu,xdm;
extern uint8 fa_che;
extern float SumAngle1;
extern float SumAngle2;
extern uint8 chuku_jishi;
extern uint8 chuku_flag,AZ,HAL_T,Huandao;
extern uint16 SPEED;
uint8 Both_sides=0;
int main(void)
{
board_init(true); //下载
BootSet(); //按键启动
InitAll();// 初始化模块
tim_interrupt_init_ms(TIM_14, 5, 2); //TIM初始化中断,5ms一次,优先级2 // 初始化引脚为推挽输出 默认高电平
tim_interrupt_enabnle(TIM_14); //使能
while(1)
{
//按下开关电机会转
if(OK){
Delay_Ms(50);
Run=1;
}
if(K_L_R)//按键控制出库方向
{
Delay_Ms(50);
AZ=1;
}
if(Spin)//按键控制左右环
{Both_sides=1;
}
if(Both_sides==0&&Huandao==7)//左环
{
Huandao=1;
}
if(Both_sides==1&&Huandao==7)//右环
{
Huandao=4;
}
SWITCH_Contral();
// //三轮显示
// oled_printf_int32(95, 1, Huandao,4);
// oled_printf_int32(95, 2,adc_convert(ADC_1, ADC1_CH00_A00),4);
// oled_printf_int32(95, 3, adc_convert(ADC_1, ADC1_CH02_A02),4);//左
// oled_printf_int32(95, 4, adc_convert(ADC_1, ADC1_CH03_A03),4);//右
// oled_printf_int32(95, 5, AZ,4);
// oled_printf_int32(95, 6, SPEED,4);
// oled_printf_int32(95, 7, Both_sides,4);
// //oled_printf_int32(102,6,wireless_rx_buffer[0],3);
// seekfree_wireless_send_buff(&fa_che, 1);
display_data();
}
}
相关图表链接:
 鲁ICP备18019460号-4
鲁ICP备18019460号-4
我要评论